CAN interfejs na fizickom nivou
CAN interfejs na fizickom nivou
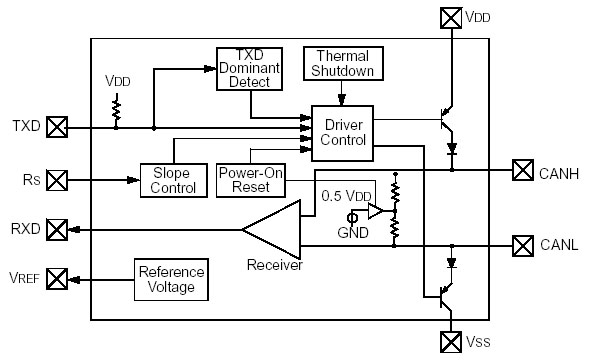
Potreban mi je CAN interfejs, dakle samo na fizickom nivou, koji moze da drajvuje CAN magistralu sa naponom od 24V. Nasao sam jedan kod Freescale ali se on vise ne proizvodi. Svi drugi koje sam mogao da pronadjem generisu napon signala od 5V i imaju 8 pina sto je super. Nasao sam i vise kontrolera za CAN koji se preko SPI vezuju sa MCU i medju njim ima onih koji daju signal od 24V na CAN liniji, ali mi to ne treba.
Komunikaciju treba da ostvarim u uslovima jakih industrijskih smetnji, a kupac ne zeli sirmovan kabl vec hoce da to budu obicne zice (pristaje da budu upredene) koje ionako koristi u instalaciji. Sve zice idu kroz jednu kanalnicu duzine par desetina metara i vecina njih su energetski vodovi na 24V ili 220VAC koji ukljucuju i iskljucuju razne uredjaje.
Ako je neko nasao nesto sto bi mi odgovaralo bio bih mu zahvalan.
Pozdrav.
 |  |
 |